2015-11-21 22:10:11
Κατά το χρονικό διάστημα 28/9-2/10 2015, το ΤΕΙ Κρήτης εκπροσωπήθηκε στο Διεθνές Συνέδριο Ρομποτικής IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2015) με την ερευνητική εργασία "Dynamic Modeling and Experimental Analysis of a Two-Ray Undulatory Fin Robot” Η ερευνητική αυτή εργασία επιλέχθηκε και βραβεύτηκε ως μία από τις τέσσερις υποψήφιες για το βραβείο Best Conference Paper Award του Συνεδρίου, ανάμεσα σε 970 εργασίες που παρουσιάστηκαν στο Συνέδριο.
Η επιλογή αυτή αποτελεί από μόνη της μία πολύ τιμητική διάκριση, καθώς το IROS είναι ένα από τα δύο σημαντικότερα Διεθνή Συνέδρια στον τομέα της Ρομποτικής, με πολύ μεγάλη απήχηση και δημοσιότητα. Αυτό γίνεται αντιληπτό λαμβάνοντας υπόψη ότι οι τέσσερις καλύτερες εργασίες προέρχονται από τα Ιδρύματα:
The Robotics Institute, Carnegie Mellon University, USΑ
The Center for Design Research – Stanford University – Stanford, USA
Computer Science and Artificial Intelligence Laboratory, Massachusetts Institute of Technology (ΜΙΤ), USA
Control Systems and Robotics Laboratory, Technological Educational Institute of Crete, Heraklion, Greece
Στην εργασία παρουσιάζονται ερευνητικά αποτελέσματα του έργου «Ανάπτυξη βιομιμητικού υποβρύχιου ρομπότ με σύστημα πρόωσης πτερυγίων κυματοειδούς κίνησης» (επιστημονικός υπεύθυνος: Δρ. Μ. Σφακιωτάκης), που υλοποιείται στο πλαίσιο της Πράξης Αρχιμήδης ΙΙΙ - του Επιχειρησιακού Προγράμματος "Εκπαίδευση και Δια Βίου Μάθηση”. Η συντακτική ομάδα της εργασίας απαρτίζεται από τα ακόλουθα μέλη του Εργαστηρίου Συστημάτων Ελέγχου και Ρομποτικής του Τ.Ε.Ι. Κρήτης: Δρ. Σφακιωτάκη Μιχάλη (Επίκουρος Καθηγητής Τμήματος Ηλεκτρολόγων Μηχανικών Τ.Ε.), Δρ. Φασουλά Ιωάννη (Επίκουρος Καθηγητής Τμήματος Μηχανολόγων Μηχανικών Τ.Ε.), Γκλίβα Ρόζα (μεταπτυχιακή φοιτήτρια του ΔΠΜΣ "Προηγμένα Συστήματα Παραγωγής Αυτοματισμού και Ρομποτικής" του Τ.Ε.Ι. Κρήτης).
Αντικείμενο του έργου
Αντικείμενο του έργου είναι η ανάπτυξη ενός καινοτόμου βιομιμητικού συστήματος πρόωσης για υποβρύχια ρομποτικά οχήματα, το οποίο βασίζεται στους μηχανισμούς κίνησης που απαντώνται σε θαλάσσιους οργανισμούς όπως οι σουπιές και τα σελάχια. Τα είδη αυτά μετακινούνται με καταπληκτική ευελιξία στο υδάτινο περιβάλλον χρησιμοποιώντας κυματώσεις των εύκαμπτων πτερυγίων που φέρουν πλευρικά κατά μήκος του σώματός τους.
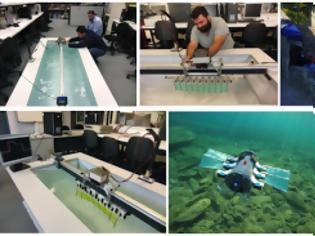
Αντλώντας έμπνευση από το μηχανισμό αυτό μετακίνησης, το αρχικό στάδιο της έρευνας εστιάστηκε στη θεωρητική μελέτη, τη σχεδίαση και την υλοποίηση μιας σειράς από πρωτότυπα ρομποτικών πτερυγίων κυματοειδούς κίνησης. Τα πρωτότυπα απαρτίζονται από σειριακά διατεταγμένες και ενεργά οδηγούμενες (μέσω ηλεκτρικών σερβοκινητήρων) ακτίνες, οι οποίες διασυνδέονται μεταξύ τους με μια ελαστική μεμβράνη.
Μέσω εκτενούς πειραματικής διερεύνησης, μελετήθηκαν τα βασικά χαρακτηριστικά παραγωγής πρόωσης των ρομποτικών πτερυγίων συναρτήσει των κινηματικών παραμέτρων του οδεύοντος κύματος και αποτιμήθηκε η ακρίβεια των μαθηματικών μοντέλων που αναπτύχθηκαν για την ανάλυση της δυναμικής τους και τη σύνθεση στρατηγικών για τον έλεγχο της κίνησής τους. Στη συνέχεια, τα αποτελέσματα αυτά αξιοποιήθηκαν για τη σχεδίαση και κατασκευή ένα αυτόνομου υποβρύχιου ρομποτικού οχήματος που είναι εξοπλισμένο με ένα ζεύγος πλευρικά τοποθετημένων πτερυγίων κυματοειδούς κίνησης.
Το πρωτότυπο διαθέτει επίσης αδρανειακό σύστημα προσδιορισμού προσανατολισμού (μονάδα IMU/AHRS) για την πλοήγησή του στο χώρο, μονάδα ασύρματης επικοινωνίας για την αποστολή δεδομένων τηλεμετρίας, και μία κάμερα για τη λήψη υποβρύχιων πλάνων. Aποτελεί επομένως μια ολοκληρωμένη πλατφόρμα για τη διερεύνηση των δυνατοτήτων και των προοπτικών πρακτικής εφαρμογής του καινοτόμου αυτού συστήματος σε υποβρύχια οχήματα για την πρόωση και την εκτέλεση ελιγμών ακριβείας.
Η ερευνητική ομάδα έχει διακριθεί επίσης με τα βραβεία
Best Application Paper Award για εργασία που παρουσιάστηκε στο διεθνές συνέδριο Int. Workshop on Robotics in Alpe-Adria-Danube Region (RAAD 2013),
Best Paper Award για εργασία που παρουσιάστηκε στο διεθνές συνέδριο Int. Conf. on New Horizons in Industry, Business and Education (NHIBE 2015)
Best Paper Award in control systems για εργασία που παρουσιάστηκε στο διεθνές συνέδριο ΙΕΕΕ 7th International Congress on Ultra Modern Telecommunications and Control Systems (ΙCUMT 2015).
Πηγή
Tromaktiko
Η επιλογή αυτή αποτελεί από μόνη της μία πολύ τιμητική διάκριση, καθώς το IROS είναι ένα από τα δύο σημαντικότερα Διεθνή Συνέδρια στον τομέα της Ρομποτικής, με πολύ μεγάλη απήχηση και δημοσιότητα. Αυτό γίνεται αντιληπτό λαμβάνοντας υπόψη ότι οι τέσσερις καλύτερες εργασίες προέρχονται από τα Ιδρύματα:
The Robotics Institute, Carnegie Mellon University, USΑ
The Center for Design Research – Stanford University – Stanford, USA
Computer Science and Artificial Intelligence Laboratory, Massachusetts Institute of Technology (ΜΙΤ), USA
Control Systems and Robotics Laboratory, Technological Educational Institute of Crete, Heraklion, Greece
Στην εργασία παρουσιάζονται ερευνητικά αποτελέσματα του έργου «Ανάπτυξη βιομιμητικού υποβρύχιου ρομπότ με σύστημα πρόωσης πτερυγίων κυματοειδούς κίνησης» (επιστημονικός υπεύθυνος: Δρ. Μ. Σφακιωτάκης), που υλοποιείται στο πλαίσιο της Πράξης Αρχιμήδης ΙΙΙ - του Επιχειρησιακού Προγράμματος "Εκπαίδευση και Δια Βίου Μάθηση”. Η συντακτική ομάδα της εργασίας απαρτίζεται από τα ακόλουθα μέλη του Εργαστηρίου Συστημάτων Ελέγχου και Ρομποτικής του Τ.Ε.Ι. Κρήτης: Δρ. Σφακιωτάκη Μιχάλη (Επίκουρος Καθηγητής Τμήματος Ηλεκτρολόγων Μηχανικών Τ.Ε.), Δρ. Φασουλά Ιωάννη (Επίκουρος Καθηγητής Τμήματος Μηχανολόγων Μηχανικών Τ.Ε.), Γκλίβα Ρόζα (μεταπτυχιακή φοιτήτρια του ΔΠΜΣ "Προηγμένα Συστήματα Παραγωγής Αυτοματισμού και Ρομποτικής" του Τ.Ε.Ι. Κρήτης).
Αντικείμενο του έργου
Αντικείμενο του έργου είναι η ανάπτυξη ενός καινοτόμου βιομιμητικού συστήματος πρόωσης για υποβρύχια ρομποτικά οχήματα, το οποίο βασίζεται στους μηχανισμούς κίνησης που απαντώνται σε θαλάσσιους οργανισμούς όπως οι σουπιές και τα σελάχια. Τα είδη αυτά μετακινούνται με καταπληκτική ευελιξία στο υδάτινο περιβάλλον χρησιμοποιώντας κυματώσεις των εύκαμπτων πτερυγίων που φέρουν πλευρικά κατά μήκος του σώματός τους.
Αντλώντας έμπνευση από το μηχανισμό αυτό μετακίνησης, το αρχικό στάδιο της έρευνας εστιάστηκε στη θεωρητική μελέτη, τη σχεδίαση και την υλοποίηση μιας σειράς από πρωτότυπα ρομποτικών πτερυγίων κυματοειδούς κίνησης. Τα πρωτότυπα απαρτίζονται από σειριακά διατεταγμένες και ενεργά οδηγούμενες (μέσω ηλεκτρικών σερβοκινητήρων) ακτίνες, οι οποίες διασυνδέονται μεταξύ τους με μια ελαστική μεμβράνη.
Μέσω εκτενούς πειραματικής διερεύνησης, μελετήθηκαν τα βασικά χαρακτηριστικά παραγωγής πρόωσης των ρομποτικών πτερυγίων συναρτήσει των κινηματικών παραμέτρων του οδεύοντος κύματος και αποτιμήθηκε η ακρίβεια των μαθηματικών μοντέλων που αναπτύχθηκαν για την ανάλυση της δυναμικής τους και τη σύνθεση στρατηγικών για τον έλεγχο της κίνησής τους. Στη συνέχεια, τα αποτελέσματα αυτά αξιοποιήθηκαν για τη σχεδίαση και κατασκευή ένα αυτόνομου υποβρύχιου ρομποτικού οχήματος που είναι εξοπλισμένο με ένα ζεύγος πλευρικά τοποθετημένων πτερυγίων κυματοειδούς κίνησης.
Το πρωτότυπο διαθέτει επίσης αδρανειακό σύστημα προσδιορισμού προσανατολισμού (μονάδα IMU/AHRS) για την πλοήγησή του στο χώρο, μονάδα ασύρματης επικοινωνίας για την αποστολή δεδομένων τηλεμετρίας, και μία κάμερα για τη λήψη υποβρύχιων πλάνων. Aποτελεί επομένως μια ολοκληρωμένη πλατφόρμα για τη διερεύνηση των δυνατοτήτων και των προοπτικών πρακτικής εφαρμογής του καινοτόμου αυτού συστήματος σε υποβρύχια οχήματα για την πρόωση και την εκτέλεση ελιγμών ακριβείας.
Η ερευνητική ομάδα έχει διακριθεί επίσης με τα βραβεία
Best Application Paper Award για εργασία που παρουσιάστηκε στο διεθνές συνέδριο Int. Workshop on Robotics in Alpe-Adria-Danube Region (RAAD 2013),
Best Paper Award για εργασία που παρουσιάστηκε στο διεθνές συνέδριο Int. Conf. on New Horizons in Industry, Business and Education (NHIBE 2015)
Best Paper Award in control systems για εργασία που παρουσιάστηκε στο διεθνές συνέδριο ΙΕΕΕ 7th International Congress on Ultra Modern Telecommunications and Control Systems (ΙCUMT 2015).
Πηγή
Tromaktiko
VIDEO
ΜΟΙΡΑΣΤΕΙΤΕ
ΔΕΙΤΕ ΑΚΟΜΑ
![ROC 2015: Η Αγγλία κερδίζει το Κύπελλο Εθνών [video]](https://images.newsnowgreece.com/87/877230/ROC-2015-i-agglia-kerdizei-to-kypello-ethnon-video-1-124x78.jpg)
ΠΡΟΗΓΟΥΜΕΝΟ ΑΡΘΡΟ
ROC 2015: Η Αγγλία κερδίζει το Κύπελλο Εθνών [video]

ΣΧΟΛΙΑΣΤΕ







![Στα χέρια της ΕΛ.ΑΣ. ιδιοκτήτης φυτείας στο Μυλοπόταμο - Μίνι οπλοστάσιο στην κατοχή του -[photos]](https://images.newsnowgreece.com/87/877228/sta-xeria-tis-elas-idioktitis-fyteias-sto-mylopotamo---mini-oplostasio-stin-katoxi-tou--photos-1-124x78.jpg)





